Motion planning
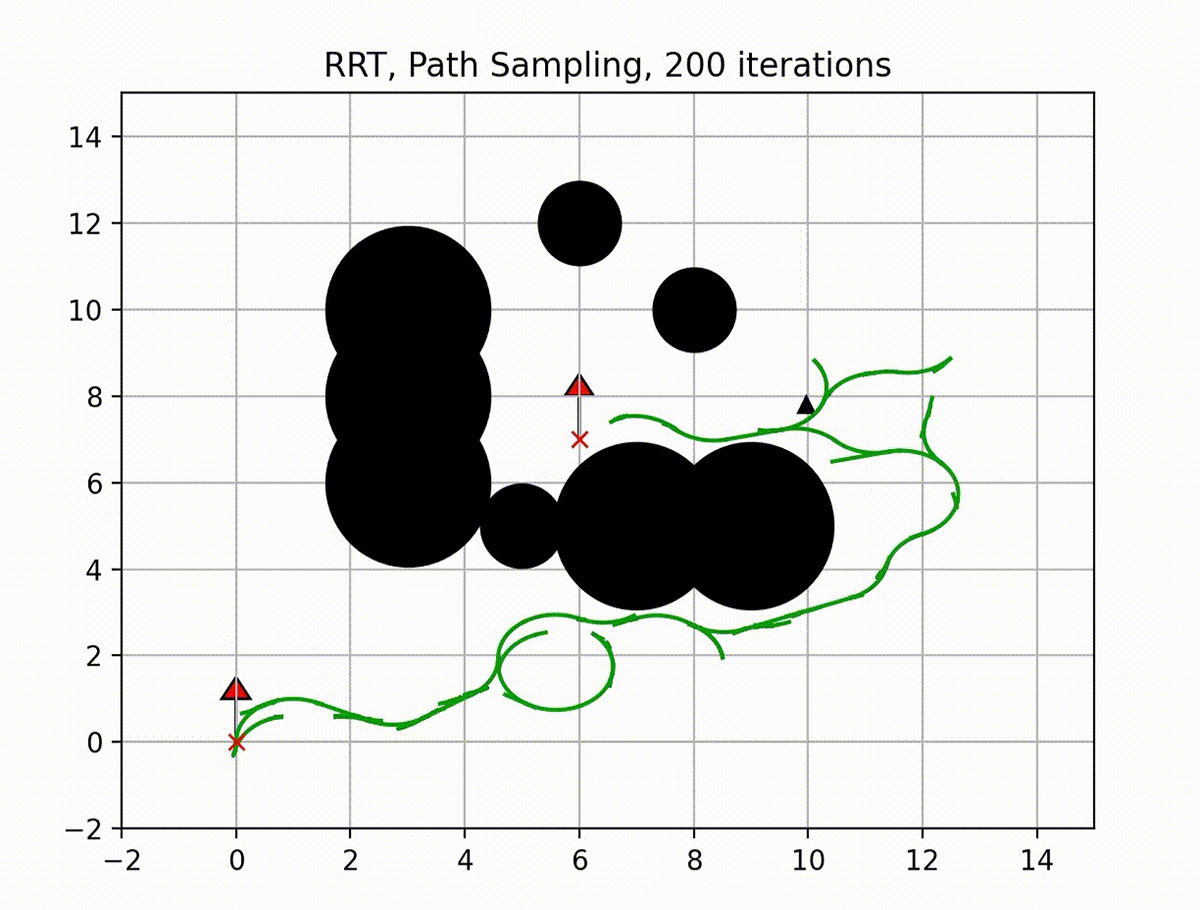
Example path created with our method
In Spring 2020 at UC Berkeley, I took EECS106B, "Robotic Manipulation and Interaction." My final project partner and I were interested in exploring motion planning, so we put together a literature review on non-holonomic motion planning methods. We also experimented with a specific planning scheme, building off of RRT*.
See our project website and final paper for more information.